UPDATE du 17 / 12 /10 : Attention, cette version 4.1 de la feuille de calcul « compute GDI » ne fonctionne qu’avec Nexus 1.4 à 1.5.2. La version 1.6.1 de Nexus nécessite la version 6 (en bas de cette page)
Dans son article de 2008, Mike Schwartz a fourni à la communauté une feuille de calcul permettant de calculer le Gait Deviation Index. Lié à cet article, vous trouverez la feuille de calcul modifiée pour fonctionner avec le plugin PECS de Vicon Motion Systems sous Nexus 1.4 (merci à Thomas POIRIER, Ingénieur en Biomécanique de l’ENSAM travaillant pour la société Biometrics France).
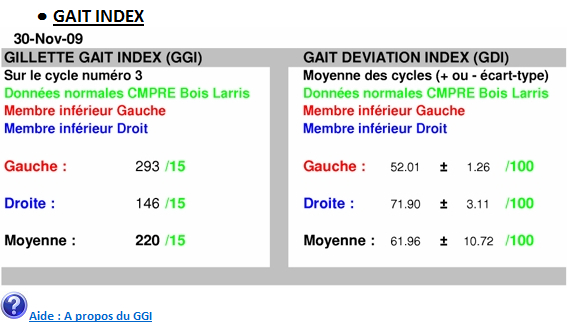
Cette version permet d’obtenir un fichier Word comprenant le GDI (Moyenne + écart-type) par jambe + la moyenne générale avec écart-type.
Le GDI est sur 100. 100 représente la marche normale sur la base d’un échantillon asymptômatique propre au laboratoire si possible (instructions dans la feuille de calcul). Le laboratoire peut bien sûr conserver la base normale du Gillette’s Hospital.
Pour installer et utiliser la feuille via PECS :
1èrement Ouvrir Nexus (pas Workstation…)

Ensuite, il faut un essai avec le .vst Plug In Gait. Il ne faut pas de trous et labelliser les évènements de pose et de décollement du pied.
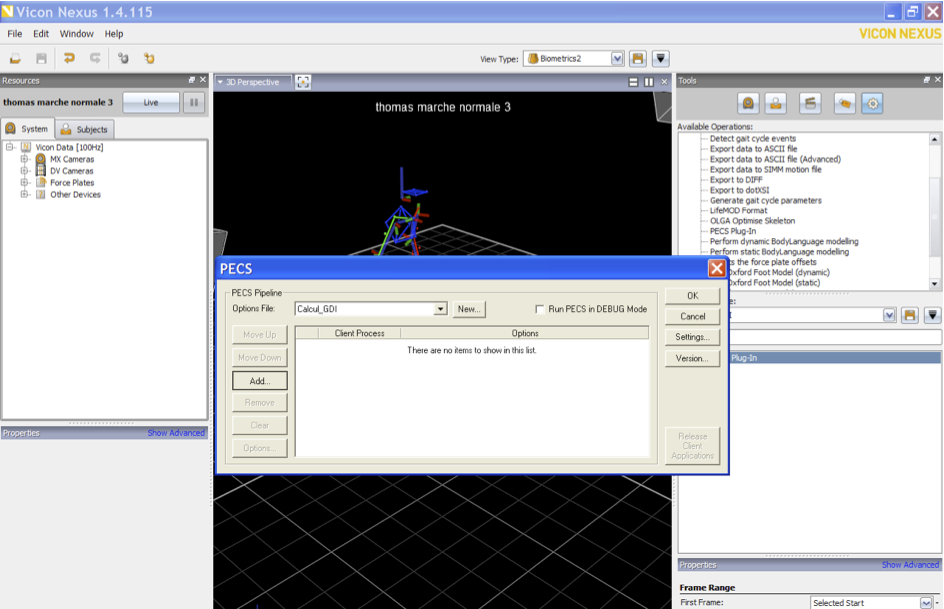
Ensuite seulement charger le pipeline PECS :
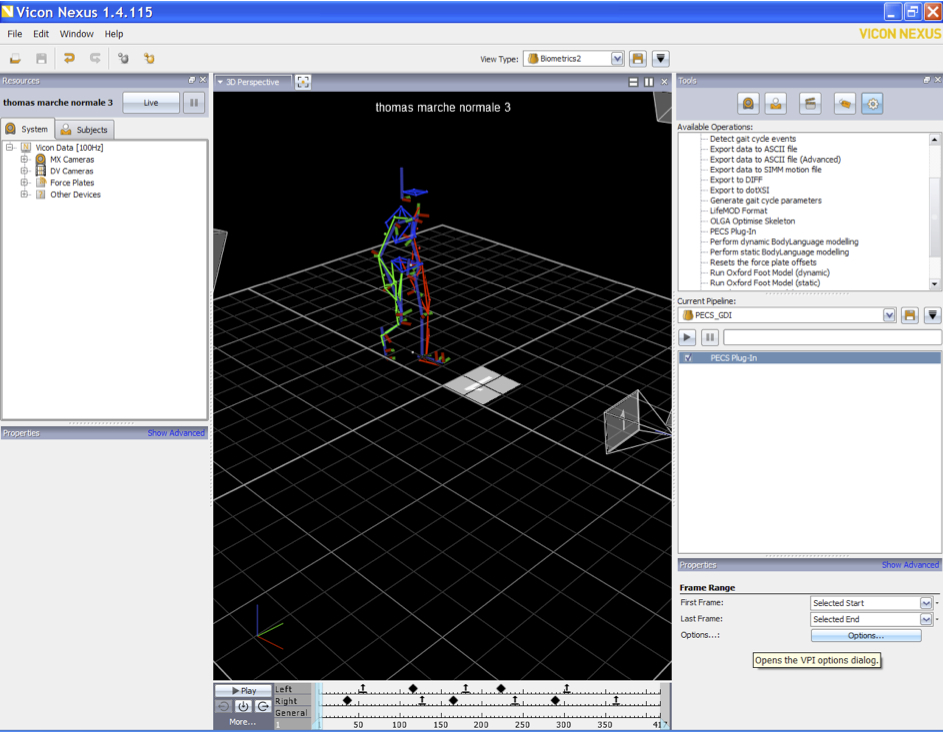
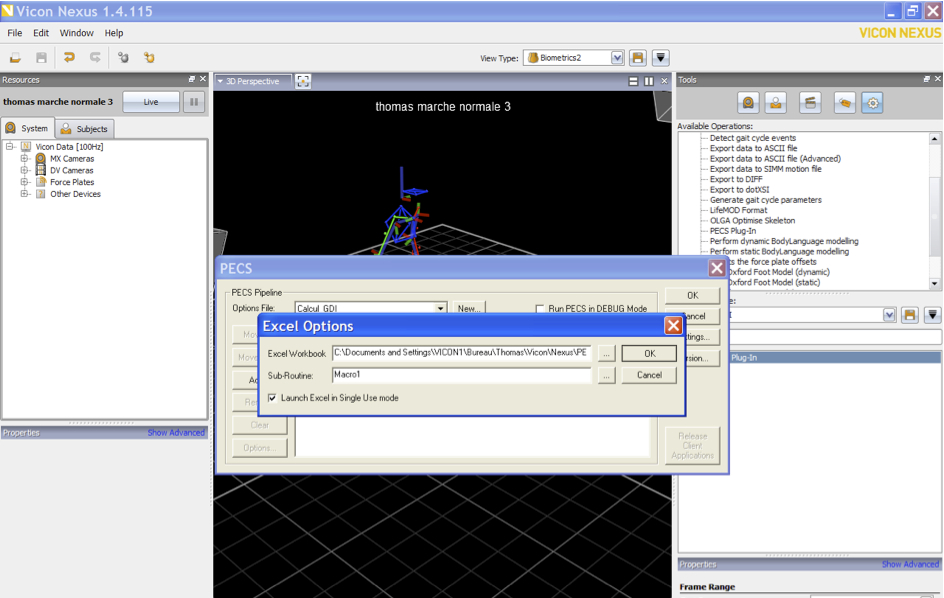
Dans les Options de PECS,
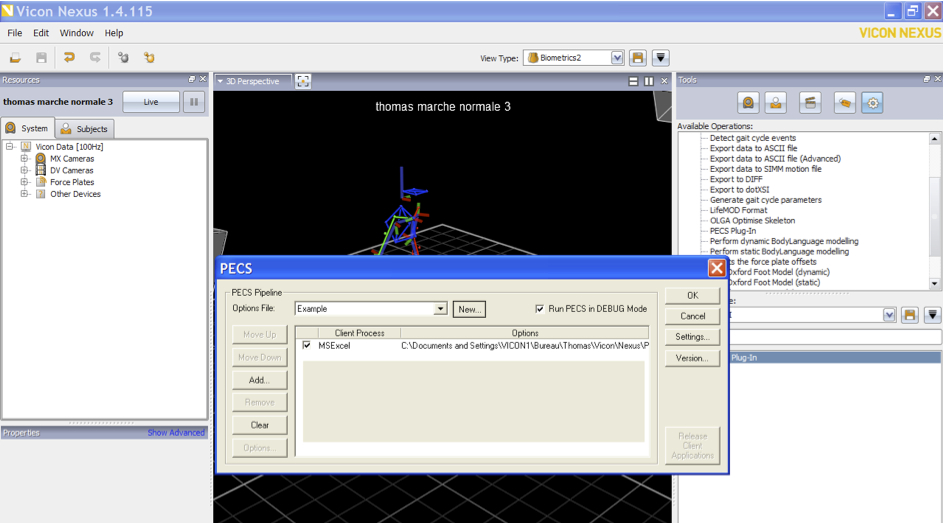
Si l’option Run PECS in Debug Mode est cochée, il faut la décocher.
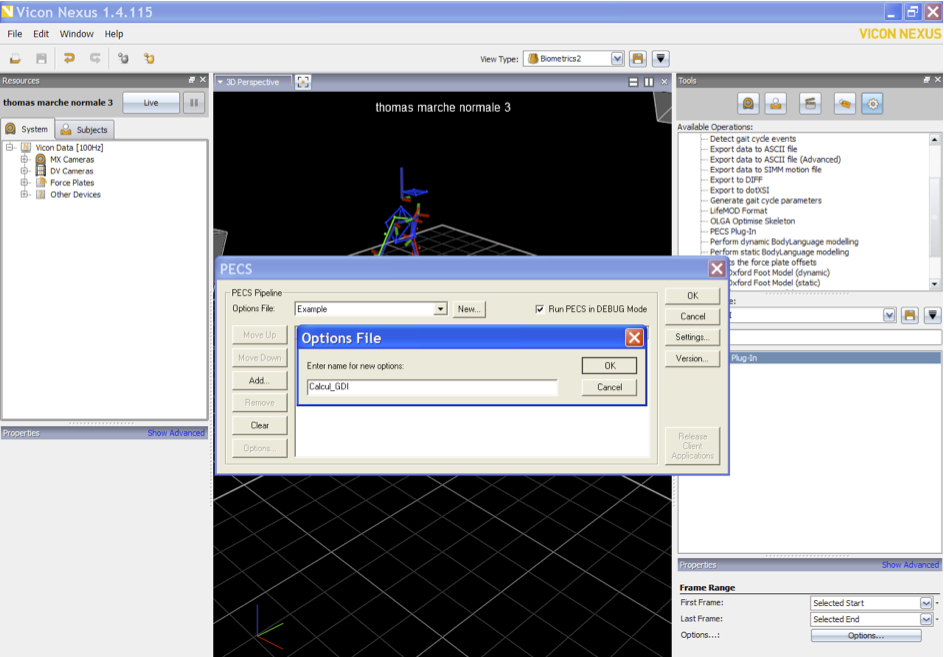
Cliquer sur New, puis indiquer le nom de l’option :
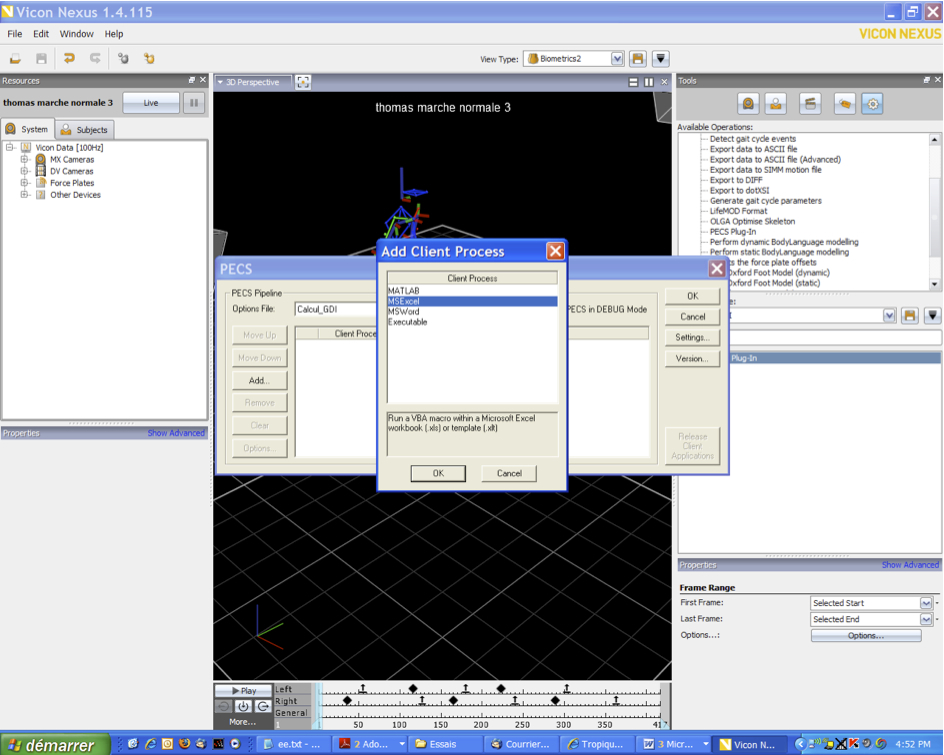
Cliquer sur Add pour ajouter le fichier Excel « calculate the GDI » :
Sélectionner MSExcel :
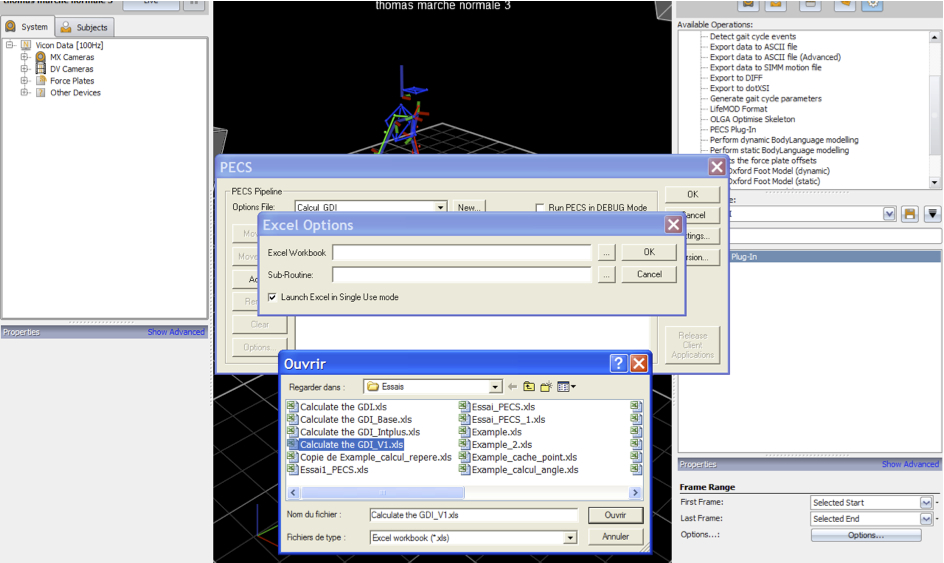
Sélectionner le fichier
Puis la Macro
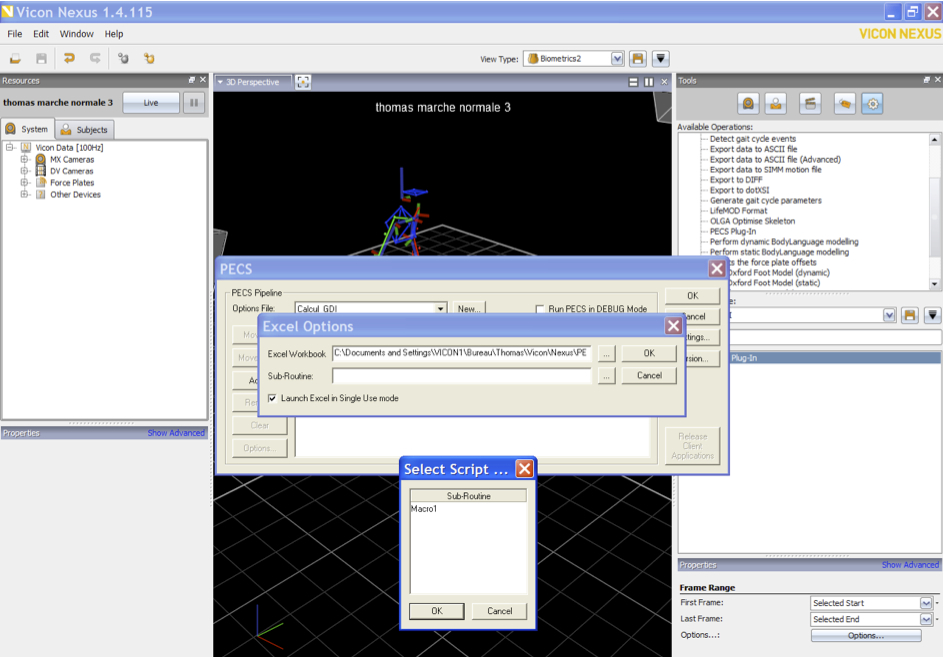
Puis Ok
Et encore OK
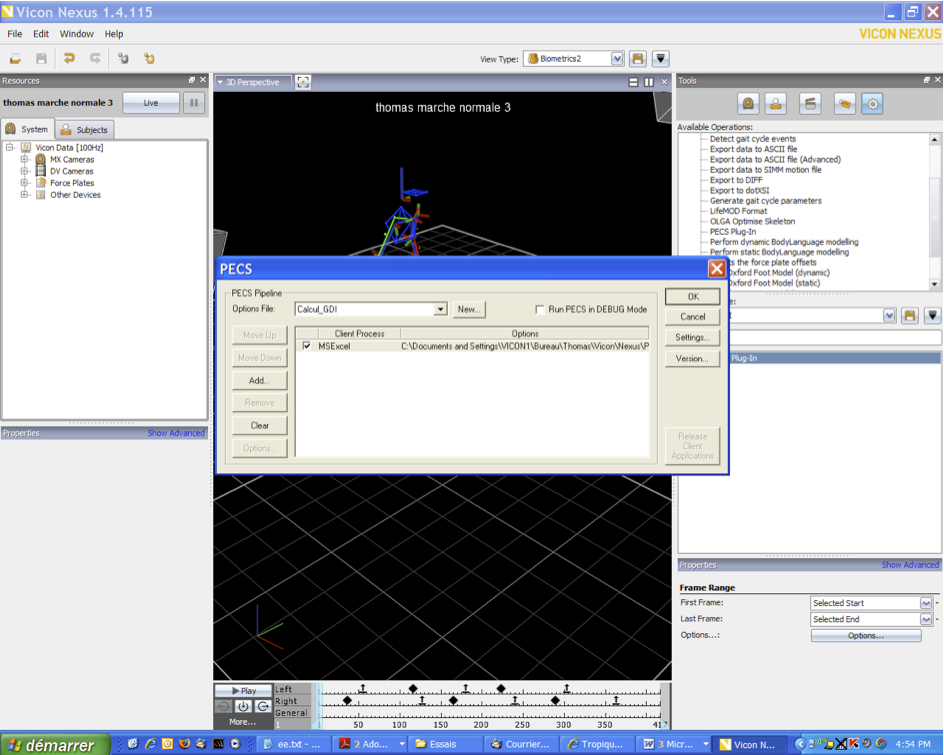
Lancer le Pipeline.
Excel se lance automatiquement et affiche un tableau contenant le GDI calculé à gauche, à droite et globalement. Le tout avec les écart-types. A la suite, Word s’ouvre et affiche un texte résumant les résultats.
Pour toutes remarques, inscrivez-vous sur ce site et utilisez le forum ci-dessous.
Dans les rapports d’analyse de la marche, la présentation des index donne ça :

- Démarrage des vidéos de formation - 17 avril 2024
- Colloque sur l’Analyse Fonctionnelle de la Marche - 20 février 2024
- Formation en dynamique des systèmes non-linéaires - 12 novembre 2020
-

-
Titre: Compute GDI version 4.1 (0 clic)
Légende:
Nom du fichier: compute-gdi-version-4-1.xls
Taille: 10 Mo
-

-
Titre: The gait deviation index: A new comprehensive index of gait pathology (0 clic)
Légende:
Nom du fichier: the-gait-deviation-index-a-new-comprehensive-index-of-gait-pathology.pdf
Taille: 582 Ko